Intelligent Breeding Robot Greatly Accelerates Breeding and Seed Production Processes in Modern Greenhouse Crops
Font:【B】 【M】 【S】
The Institute of Automation, Chinese Academy of Sciences, and the Institute of Genetics and Developmental Biology, Chinese Academy of Sciences, have jointly developed a fully automated method and robotic system aimed at accelerating breeding/seed production processes in modern greenhouse crops. On August 11, the related research paper, entitled Engineering tomato floral morphology facilitates robotization of cross-pollination and speed breeding, was published online in Cell. This research represents a deep integration of artificial intelligence, robotics, and modern breeding industry, opening up an intelligent breeding (BAR) model of “Biological Technology (BT) foundation + AI empowerment + robotic labor (Robot),” breaking through the bottlenecks of traditional hybrid breeding and seed production, significantly reducing breeding costs, shortening breeding cycles, and improving breeding efficiency. This research marks that China has taken the lead in completing the construction of a closed-loop technology system for intelligent robot breeding, demonstrating the major application prospects of “AI for Science” in innovating biological breeding paradigms and fostering new productive forces.
For thousands of years, human civilization has domesticated over 40 major greenhouse crops from more than 400,000 plant species. These 40 crops are the main food sources on the human table. To a certain extent, producing and cultivating these greenhouse crops provides the fundamental guarantee for food security. At present, in the four stages of greenhouse crop breeding/seed production — “sowing–management–breeding–harvesting” — whether for cross-pollinated crops (such as cucurbits and cruciferous crops) or self-pollinated crops (such as solanaceous and gramineous crops), the breeding stage still largely relies on manually removing stamens enclosing the pistil and applying pollen onto the stigma. The manual hybrid breeding process requires extreme precision, is time- and labor-consuming, and is the main bottleneck to the full automation of modern greenhouse breeding/seed production processes.
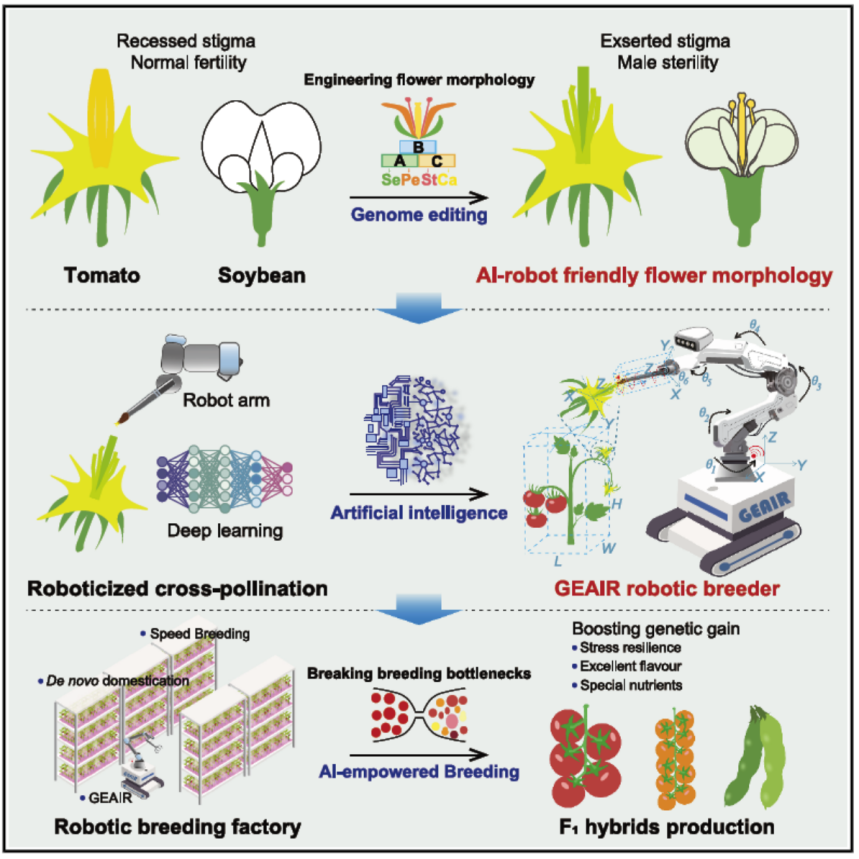
Figure 1. Intelligent breeding robot used for automation and acceleration of greenhouse tomato and soybean breeding/seed production processes.
For cross-pollinated crops, the research established methods for accurate perception of extremely small operational targets under sensor-limited conditions, compliant manipulation of delicate breeding targets, and precise stopping on greenhouse rails. Furthermore, for self-pollinated crops, the research developed male sterile lines with exposed stigmas based on molecular breeding technology. Building on these artificial intelligence robotics and molecular breeding technologies, the research team jointly developed an intelligent breeding robot for automated greenhouse crop breeding/seed production, and deployed it at the Breeding Demonstration Base of the North Zone 1 of Beijing Shounong Cuilake Facility (Figure 2), achieving automated hybrid breeding. The breeding robot achieved a stigma recognition accuracy of 85.1%, with each flower pollinated in only 13 seconds. A single cruise pollination achieved a success rate of 77.6% ± 9.4%, and the robot can perform uninterrupted, repeated cruise automated hybrid pollination around the clock to ensure successful fruit setting of each flower. With comparable fruit set rates, for cross-pollinated crops, the efficiency of robotic pollination approaches that of manual pollination; for self-pollinated crops, the robotic pollination efficiency is significantly higher than that of manual pollination, showing the potential to cultivate climate-adaptive crops faster in greenhouses to increase efficiency and reduce costs. The research results provide a scalable technical template for precision agriculture, and its “bio-design–machine adaptation” bi-directional optimization approach offers an intelligent solution to food security challenges under climate change. In the future, it can also be expanded to phenotypic monitoring, intelligent harvesting, and other full-chain automation scenarios in agriculture. At present, all components of the breeding robot have been fully localized in China, and the overall system cost shows strong application prospects.

Figure 2. Intelligent breeding robot working at the Breeding Demonstration Base, North Zone 1 of Beijing Shounong Cuilake Facility.
(a) Manual hybrid breeding (b) Robotic automated hybrid breeding
The robot related to this research was exhibited at the 2024 World Agricultural Robotics Conference and attracted widespread attention (Figure 3a). On August 12, 2025, CCTV News Channel’s Xinwen Lianbo reported on the intelligent breeding robot (Figure 3b).

Figure 3. (a) Breeding robot exhibited at the 2024 World Agricultural Robotics Conference (b) On August 12, 2025, CCTV News Channel’s Xinwen Lianbo reported on the intelligent breeding robot (images from CCTV news coverage).
Associate Researcher Minghao Yang of the Institute of Automation, Chinese Academy of Sciences, is a co-first author of the paper and also the lead responsible for the artificial intelligence and robotics part. Master’s students of the Institute of Automation, Chinese Academy of Sciences — Yangchang Sun (Class of 2021), Hongchang Lyu (Class of 2023), Jinyang Wang (Class of 2025) — and interns Jun Xiao, Jingda Qi, Anqi Liu, and Zhigang Xiao participated in work related to robotic visual perception, dexterous robotic manipulation, robotic system construction, and autonomous greenhouse roaming. Researcher Cao Xu of the Institute of Genetics and Developmental Biology, Chinese Academy of Sciences, is the corresponding author of the paper; doctoral students Yue Xie and Tinghao Zhang of the same institute are co-first authors, responsible for molecular breeding design. Researcher Hua Han of The Laboratory of Brain Atlas and Brain-Inspired Intelligence, Institute of Automation, Chinese Academy of Sciences, and Professor Jianhua Tao of Tsinghua University made important contributions to this paper. In addition, Xinxu Li, Shushan Li, and others from Shounong Cuilake Facility provided important support and assistance for this research. This work was supported by the Huairou Brain Atlas and Brain-Inspired Intelligence Interdisciplinary Research Platform Project of the Institute of Automation, Chinese Academy of Sciences, the NSFC Beijing–Tianjin–Hebei Basic Research Cooperation Program, the CAS Strategic Priority Research Program (Class B), and the Guangxi Key R&D Program.
Related publications (co-first author, #corresponding author):
Yue Xie, Tinghao Zhang*, Minghao Yang*, Hongchang Lyu, Yupan Zou, Yangchang Sun, Jun Xiao, Wenzhao Lian, Jianhua Tao, Hua Han, and Cao Xu#, "Engineering tomato floral morphology facilitates robotization of cross-pollination and speed breeding," Cell, 2025.
Minghao Yang*#, Hongchang Lv*, Yongjia Zhao#, Yangcheng Sun, Hang Pan, Qi Sun, Jinlong Chen, Hongbo Yang. "Delivery of Pollen to Forsythia Flower Pistils Autonomously and Precisely Using a Robot Arm," Computers and Electronics in Agriculture, 214, 2023. pp: 108274–108287, 2023.108274.
Paper links:
https://doi.org/10.1016/j.cell.2025.07.028
http://dl.acm.org/doi/10.1016/j.compag.2023.108274
Copyright Institute of Automation Chinese Academy of Sciences All Rights Reserved
Address: 95 Zhongguancun East Road, 100190, BEIJING, CHINA
Email:brain-ai@ia.ac.cn